ドナルドソンの論説
- Title: Mathematical aspects of gauge theory: lecture notes (February 21, 2017)
- Author: Simon Donaldson
- Pages: 41p
- URL: https://www.lsgnt-cdt.ac.uk/assets/8h00svqzffcqd97tf8oxcokv199scmjb.pdf
のp.3に、"The falling cat"の問題がある。この例題は難しい。
ノルの論文集の三番目の論文
- Title: [3] Updating The Non-Linear Field Theories of Mechanics (2004)
- Author: Walter Noll
- URL: http://www.math.cmu.edu/~wn0g/FC.pdf
を読みながら考えた。
ネコ〈猫〉を連続体〈continuous body〉と考えると(事実に忠実だが)難しい。スティックマンならぬスティックキャットで考える。スティックキャットは、8点7辺の有向グラフとする。
- 頂点集合 C0: H 頭, T 尾端, F 前, B 後, FL 前左, FR 前右, BL 後左, BR 後右
- 辺集合 C1: [F, H] 首, [F FL] 左前脚, [F, FR] 右前脚, [F, B] 胴, [B, BL] 左後脚, [B, BR] 右後脚, [B, T] 尾
ネコの抽象形状〈abstract shape〉は、上のグラフ構造で与える。質量や物性はグラフ上の何らかの関数として定義する。辺は剛体でスティックと呼ぶ。
Eを3次元ユークリッドアフィン空間として、ユークリッドアフィン枠を固定してR3と同一視する。ネコの配置〈placement〉は、C0→R3 で決まるが、スティックが剛体である制約があり、ネコの配置空間〈placement space〉は、(R3)8 の部分空間になる。
ネコの運動〈motion〉は、時区間から配置空間への写像になる。配置により得られた、E(R3で代用)内の図形を具象形状〈concrete shape〉と呼ぶ。具象形状は幾何グラフになる。なにか選ばれた配置を基準配置.〈reference placement〉と呼び、基準配置の具象形状を基準形状〈reference shape〉、または基準領域〈reference region〉と呼ぶ。具象形状=配置の領域は、ユークリッド空間内の部分点集合と考える。
換置〈transplacement〉とは、領域〈具象形状〉からユークリッド空間への、点集合のあいだの写像である。選んだ基準配置の領域〈region〉を域〈domain〉とする換置の集合を換置空間〈transplacement space〉と呼ぶ。換置空間は、基準配置に依存する。配置空間と換置空間は、1:1に対応するので事実上は同じものである。
ノルは、2004年に40年前の著書の用語法をリバイスしてるが、configurationとdeformationの定義を変えている。ノルの新configurationを、ここでは姿勢〈attitude〉と呼ぶ。ノルの新deformation-processを、姿勢の変更過程〈deformation-process of attitude〉と呼ぶ。変更過程は運動と同義になる。
ネコの抽象形状 C = (C0, C1) において、C0上の距離を姿勢と呼ぶ。スティックの長さも距離になるが、剛体なので変更〈deform〉できない。距離空間になったCも姿勢と呼ぶ。区別したいなら、姿勢距離と姿勢構造。
一般に、変更過程〈deformation-process〉とは、時間パラメータを持った何かで、時間パラメータの空間をTとして、T→X という写像。Tが離散構造なら離散変更過程〈discrete deformation-process〉、連続構造なら連続変更過程〈continuous deformation-process〉。連続変更過程を運動とも呼ぶ。
ノルは、姿勢(それを configuration と読んでる)の変更過程だけを deformation-process と読んでいるが、狭すぎるだろう。変更過程は一般的な意味として、姿勢の変更過程、姿勢の運動という言い方をする。
ネコの姿勢と、姿勢の変更過程は、ネコの意思で自発的に制御可能だとする。この制御により、うまく着地することになる。とりあえず、ネコ問題のスティックキャットによる記述だけはできた。記述だけだから、本番はこれから先だが、難しい。
[追記]
猫写真
アクリル印刷すると有料だけど、画像だけなら大丈夫だろう。
問題として真面目に考察されている。解決に100年かかっている難問だった。
19世紀のストークス(Sir George Gabriel Stokes, 1819年8月13日 - 1903年2月1日)やマクスウェル(James Clerk Maxwell, 1831年6月13日 - 1879年11月5日)も考えたそうだ。解決は1963年。ゲージ理論による定式化は1993年。
論文:
- Gauge Theory of the Falling Cat (June 8, 1993)
- Richard Montgomery
- 26p
- URL: http://www.zzwave.com/zzw/upload/up/2/54ba35b.pdf?autoplayNow (紙をスキャンした画像)
p.18にあった力学モデルの絵:
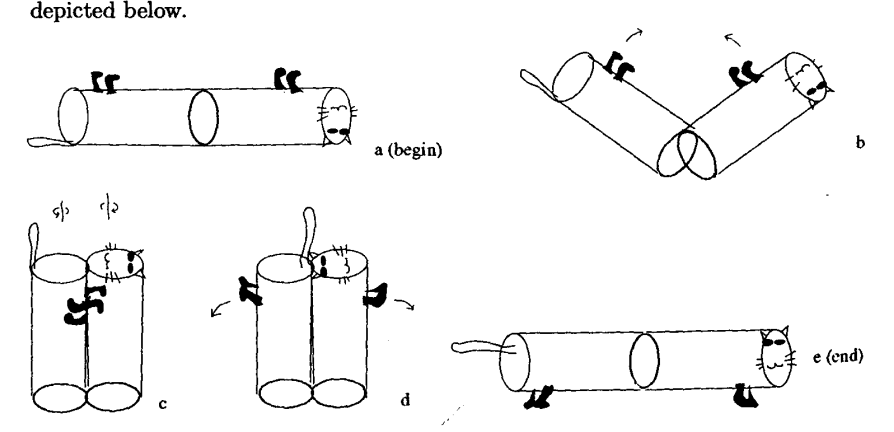
[/追記]